Published on Fri Jan 24 2025 00:00:00 GMT+0000 (Coordinated Universal Time) by Kristin Wei
Personally I have heard ROS since 2015 (wow TEN YEARS from now), but at that time the linux system is not very stable (I believe the popular version was Ubuntu14 or Ubuntu16) and I was struggling with other courses in Uni. So I did not have the chance to learn until now, but it’s never too late to learn anything.
What is ROS?
ROS is a flexible framework for writing robot software. It is a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms.
Installation
We will use ROS2 here, since ROS2 is the latest version of ROS and it is more stable and more powerful than ROS1.
I tried both humble and jazzy, and found out that the new Gazebo is not easy to use intuitively, and there are less tutorials about that. So for Gazebo part, I use classic Gazebo and ros2 humble.
To be honest, the official website is way much better, so you may want to follow this for jazzy and this for humble
Docker
I wouldn’t recommend using docker with Gazebo and rviz, from my experience so far, it’s not stable enough or hard to make it correct.
There are some docker tutorials for humble and jazzy already:
- Humble - Setup ROS 2 with VSCode and Docker [community-contributed]
- Jazzy - Setup ROS 2 with VSCode and Docker [community-contributed]
I also attach my personal code for docker using docker-compose.yaml(Docker) and devcontainer.json (VSCode extension).
Humble Docker Set Up
// devcontainer.json
{
"name": "ROS 2 Development Container",
"privileged": true,
"remoteUser": "kristin",
"dockerComposeFile": "docker-compose.yaml",
"service": "devcontainer",
"workspaceFolder": "/home/kristin/ros2_ws", // you should change to your own workspace
"customizations": {
"vscode": {
"extensions": [
"ms-vscode.cpptools-extension-pack",
"twxs.cmake",
"donjayamanne.python-extension-pack",
"eamodio.gitlens",
"ms-iot.vscode-ros",
"ms-azuretools.vscode-docker",
"ms-python.black-formatter",
"smilerobotics.urdf",
"redhat.vscode-xml"
]
}
},
"postCreateCommand": "sudo rosdep update && sudo rosdep install --from-paths src --ignore-src -y && sudo chown -R $(whoami) /home/kristin/ros2_ws/" // you should change to your own workspace
}# ./devcontainer/docker-compose.yaml
services:
devcontainer:
build:
context: .
dockerfile: Dockerfile
args:
- USERNAME=kristin # you should change to your own username
image: vac611/ros2_humble_gazebo:latest # you should change to your own image name
container_name: vac611_ros2_humble_gazebo # you should change to your own container name
volumes:
- /home/kristin/ros2_ws:/home/kristin/ros2_ws:rw # you should change to your own workspace path
- type: bind
source: /tmp/.X11-unix
target: /tmp/.X11-unix
consistency: cached
- type: bind
source: /dev/dri
target: /dev/dri
consistency: cached
command: sleep infinity
network_mode: host
pid: host
ipc: host
environment:
- DISPLAY=unix:0
- ROS_AUTOMATIC_DISCOVERY_RANGE=LOCALHOST
- ROS_DOMAIN_ID=42
privileged: trueJazzy Docker Set Up
// .devcontainer/devcontainer.json
{
"name": "ROS 2 Development Container",
"privileged": true,
"remoteUser": "kristin",
"dockerComposeFile": "docker-compose.yaml",
"service": "devcontainer",
"workspaceFolder": "/home/kristin/ros2_ws", // you should change to your own workspace path
"customizations": {
"vscode": {
"extensions": [
"ms-vscode.cpptools-extension-pack",
"twxs.cmake",
"donjayamanne.python-extension-pack",
"eamodio.gitlens",
"ms-iot.vscode-ros",
"ms-azuretools.vscode-docker",
"ms-python.black-formatter",
"smilerobotics.urdf",
"redhat.vscode-xml"
]
}
},
"postCreateCommand": "sudo rosdep update && sudo rosdep install --from-paths src --ignore-src -y && sudo chown -R $(whoami) /home/kristin/ros2_ws/" // you should change to your own workspace path
}# .devcontainer/docker-compose.yaml
services:
devcontainer:
build:
context: .
dockerfile: Dockerfile
args:
- USERNAME=kristin # you should change to your own username
image: vac611/ros2_jazzy_gazebo:latest # you should change to your own image name
container_name: vac611_ros2_jazzy_gazebo # you should change to your own container name
volumes:
- /home/kristin/ros2_ws:/home/kristin/ros2_ws:rw # you should change to your own workspace path
- type: bind
source: /tmp/.X11-unix
target: /tmp/.X11-unix
consistency: cached
- type: bind
source: /dev/dri
target: /dev/dri
consistency: cached
command: sleep infinity
network_mode: host
pid: host
ipc: host
environment:
- DISPLAY=unix:0
- ROS_AUTOMATIC_DISCOVERY_RANGE=LOCALHOST
- ROS_DOMAIN_ID=42
privileged: trueBashrc file set up
After installation, you need to set up the bashrc file to source the ros2 environment for autocompletion and other features.
# ~/.bashrc
# ros2
source /opt/ros/humble/setup.bash
# colcon
source /usr/share/colcon_cd/function/colcon_cd-argcomplete.bash
# ros2 workspace
source ~/ros2_ws/install/setup.bash # you should change to your own workspace path
# gazebo
source /usr/share/gazebo/setup.bash
# nav2
export TURTLEBOT3_MODEL=waffle
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp # a fixROS2 Basic Concepts
You can find the official explanation as a reference
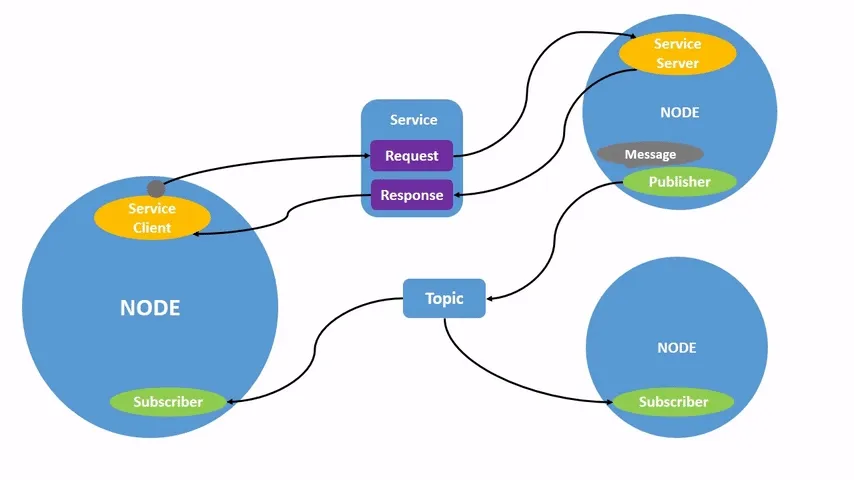
Nodes
- Node the a basic unit of computation in ROS.
- It needs to inherit from
rclcpp::Node(c++) orrclpy::Node(python) and then you can use it to create a node.
Topics
- Topic can have multiple subscribers and publishers.
- A timer is usually set to publish data at a certain rate.
Services
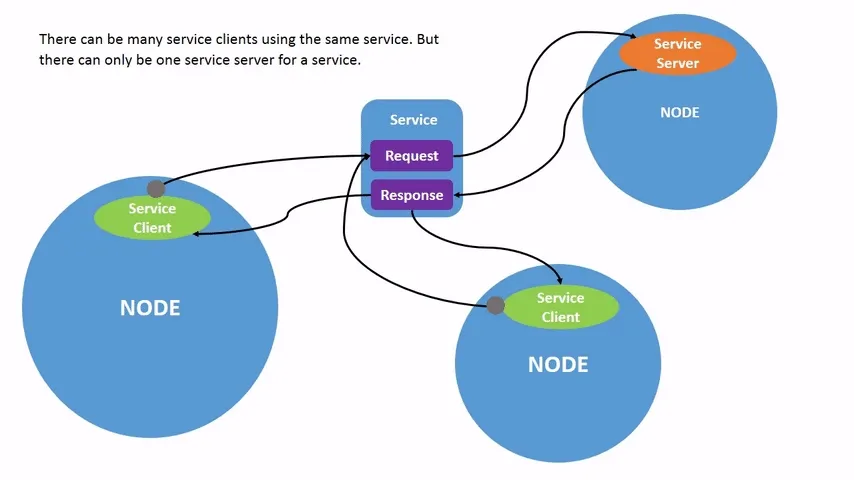
- Service can have only one server but multiple clients.
- It is triggered by a request and the response is sent back to the requesting client.
Actions
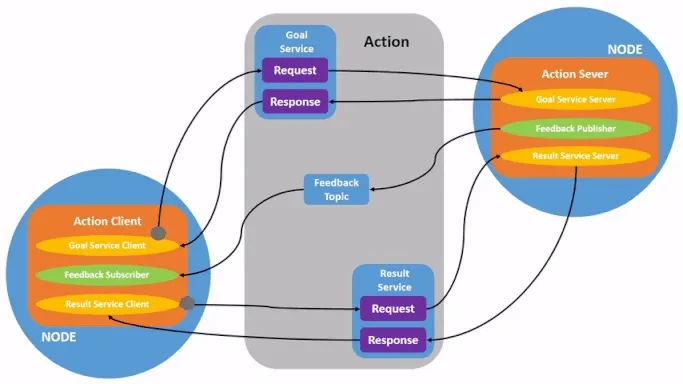
- Actions are like services that allow you to execute long running tasks, provide regular feedback, and are cancelable.
- A robot system would likely use actions for navigation. An action goal could tell a robot to travel to a position. While the robot navigates to the position, it can send updates along the way (i.e. feedback), and then a final result message once it’s reached its destination.
Parameters
- Parameters are used to store and retrieve configuration data that is needed by nodes at runtime.
- Can also save the parameter settings to a file to reload them in a future session.
ROS Launch
Launch files in ROS are used to start multiple nodes and set parameters in a single command. It supports python and xml.
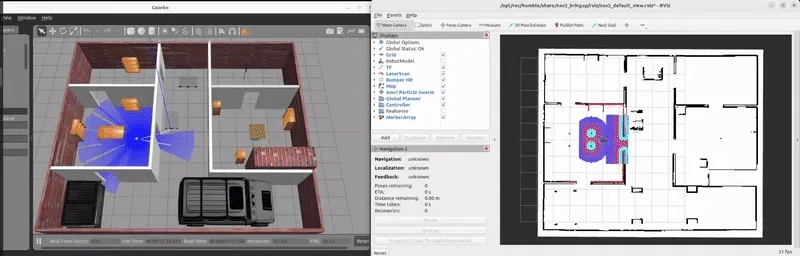
Nav2
The official website is here.
It provides navigation tools in Gazebo and rviz. You can play with it from here, and navigate the turtlebot3 in Gazebo world environment.
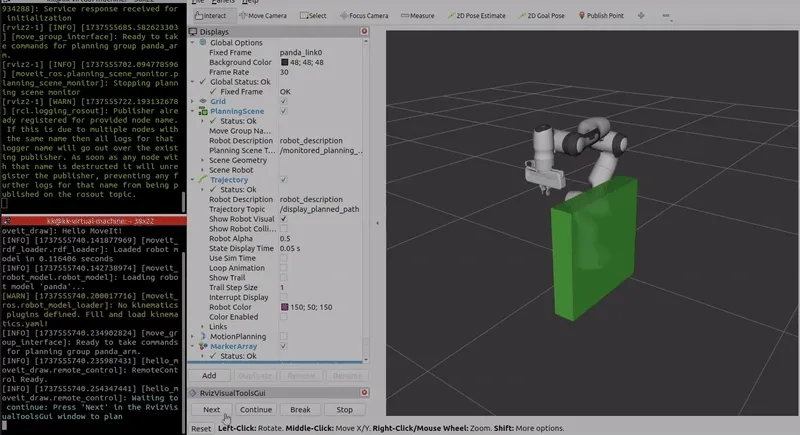
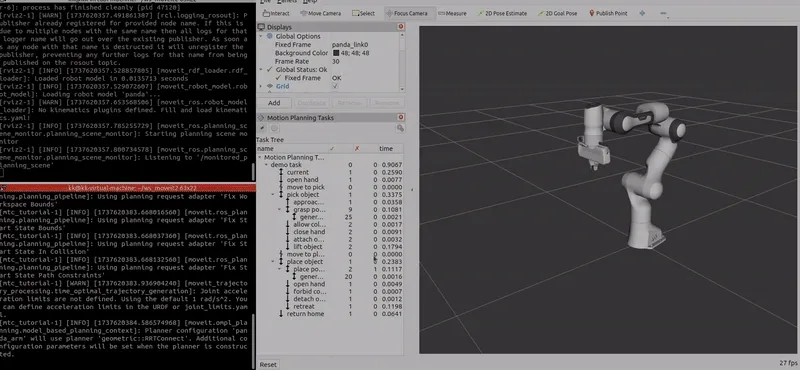
Moveit2
Moveit is a very useful tool to plan and control the robot arm. You can find the official website here
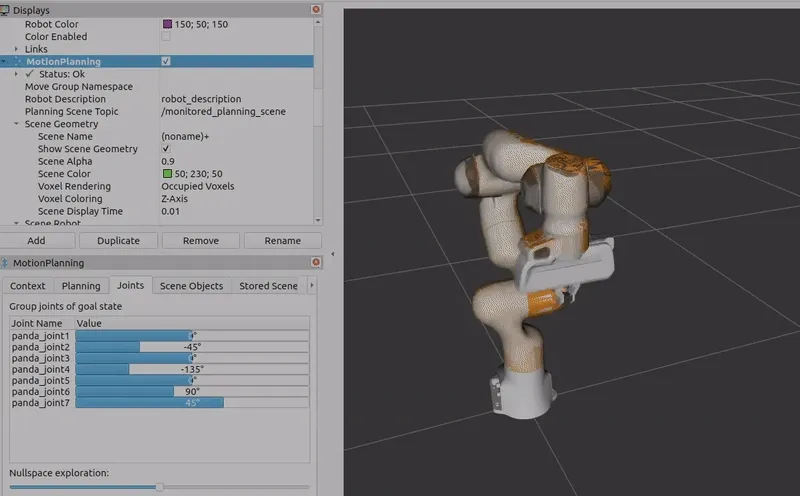
It allows robot to plan trajectory by avoiding obstacles, is able to control arm to pick up and release objects.
ROS Demos
I made a few demos to learn ROS. You can find them in My Github ROS Demo repo.
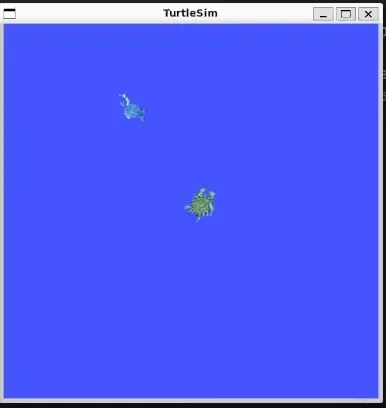
Turtlesim Chase Game
in branch
ros_beginner
This demo only uses basic ROS concepts (node, topic, message, service, launch).
The src code in c++ and python is in package src/turtle_control.
- requires
turtlesimpackage.
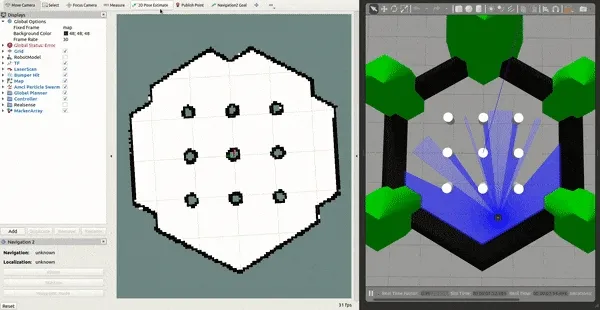
Turtlebot3 Navigation
in branch
nav2
In this demo, I created a map using Gazebo. It has online models that we can easily drag inside Gazebo.
- map is in
maps/map_floor.yaml, generated usingnav2_map_serverand rviz. - launch file is in
launch/turtlebot3_floor.launch.xmlwhich callslaunch/turtlebot3_floor.pyandnavigation2.launch.pyinturtlebot3_navigation2 - wallpoint navigation is in
src/nav2_wallpoint.py
What’s Next?
I am going to create a robot to pick up objects that appear in the camera, maybe can use a chatbot to control which object to pick. Please stay tuned for my next blog post. :)
Written by Kristin Wei
← Back to blog